|
Идея синтезирования апертуры тесно связана с компьютерной томографией.
Основной проблемой в использовании станций радиолокационного зондирования является проблема повышения их разрешающей способности. Если мы имеем идеальное параболическое зеркало с апертурой R, фокусирующее излучение в точку на расстоянии h от плоскости зеркала, то из-за волновых свойств света вместо точки в фокальной плоскости получится, как известно, дифракционная структура, характерные размеры которой d определяются по простой формуле: d=2λh/R.
При размере зеркала в 1 метр и расстоянии от космического аппарата до Земли порядка 200 км в оптическом диапазоне (λ=0.5 мкм) разрешающая способность составляет порядка 20 см. Единственным недостатком, который имеют оптические системы регистрации изображений с помощью космических аппаратов, является невозможность проведения наблюдений при наличии облаков и в ночное время суток.
Применение РЛС с длиной волны порядка 10 см позволяет вести наблюдение практически независимо от времени суток и состояния атмосферы. Недостатком таких радиолокационных систем является их абсолютно неприемлемая для практических приложений разрешающая способность, которая хуже приведенного выше примера в 200000 раз, то есть составляет несколько километров.
Повысить разрешающую способность РЛС можно за счёт применения специальной методики наблюдений, основанной на принципах синтезированной апертуры. Идея синтезированной апертуры с помощью РЛС СА (с синтезированной апертурой) бокового обзора приведена на рис.1.
Зондирующие электромагнитные импульсы распространяются от космического аппарата, отражаются от поверхности и поступают на приёмное устройство РЛС.
Отражающие свойства поверхности Земли будем описывать комплексной функцией g(x,y) декартовых координат x,y в исследуемой области поверхности Земли.
Отражённые сигналы u(t) после детектирования регистрируются как входные данные. Запоминая эти сигналы на определённом отрезке траектории движения космического аппарата (который составляет несколько десятков километров) и решая обратную задачу реконструкции комплексной функции g(x,y), можно существенно повысить разрешающую способность радиолокационной системы. С математической точки зрения обратная задача РЛС СА сводится к решению линейного операторного уравнения относительно неизвестной функции двух переменных g(x,y).
|
|
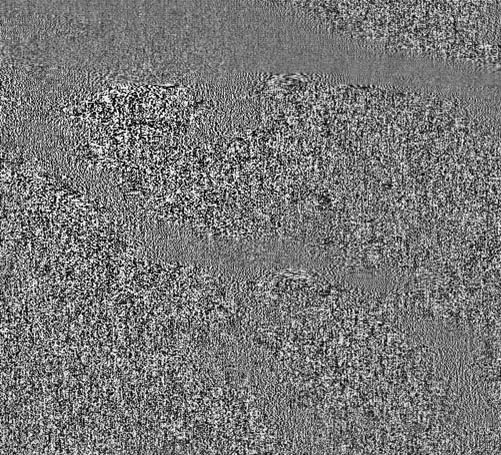
На рис.1 приведены: а - схема работы РЛС СА,
б - входные данные u(t) для решения обратной задачи, переданные с борта космического аппарата "Алмаз",
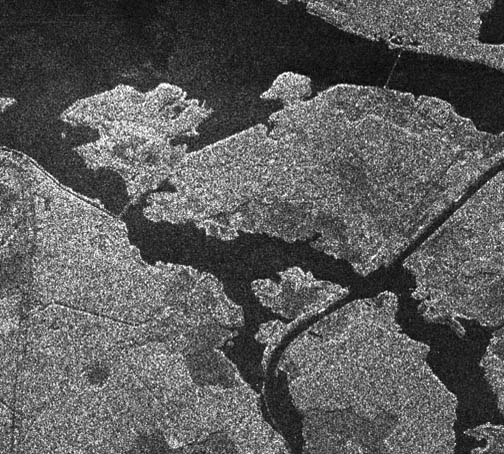
в - результаты решения обратной задачи - восстановленное изображение участка земной поверхности (окраины Москвы и ближнее Подмосковье).
Чёрный цвет на рис.1в означает отсутствие отражённого сигнала. При использовании РЛС СА бокового обзора радиолокационные импульсы от ровной водной поверхности отражаются как от зеркальной поверхности и не попадают на приёмники РЛС, поэтому водная поверхность выглядит на рис.1в как чёрная.
В приведённом примере разрешающая способность составляет 11 - 15 м.
[1]
В используемых в РЛС СА математических моделях важно, чтобы пространство между РЛС и исследуемым объектом было однородным и изотропным. Такая модель хорошо применима для электромагнитного зондирования Земли из космоса и акустического зондирования поверхности океанского дна.
|
|
1. A. Tikhonov, A. Goncharskii, A. Matviyenko et al. Image-reconstruction problems for synthetic aperture radars. // Doklady Akademii nauk SSSR. — 1992. — Vol. 322, no. 5. — P. 884–886
|
![[MSU]](../img/msu.jpg)